1. 预备知识
1.1 高斯分布
高斯分布是拟合随机数据最常用的模型。单变量$x$的高斯分布概率密函数如下:
\[\textit{N}(x; \mu, \sigma) = \frac{1}{\sqrt{2\pi\sigma^2}}\exp\left[-\frac{(x-\mu)^2}{2\sigma^2}\right]\]其中
-
$\mu $ 分布的数学期望,
-
$\sigma$ 标准差, $ \sigma ^{2}$ 是方差.
更一般的情况,如果数据集是d维的数据, 就可以用多变量高斯模型来拟合。概率密度是:
\[\textit{N}(x; \mu, \Sigma) = \frac{1}{\sqrt{(2\pi)^d\det(\Sigma)}}\exp\left[-\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu)\right]\]其中
- $x$是一个d×N的向量, 代表N组d维数据,
- $\mu$是一个d×1 的向量, 代表每维的数学期望,
- $\Sigma$是一个d×d的矩阵, 代表模型的协方差矩阵
1.2 Jensen不等式
这里给出随机分析里面Jensen’s不等式的结论。在EM算法的求解过程中,Jensen不等式可以简化目标函数。
定理. 对一个凸函数$f$和随机变量$x$:
\[f\left[E(x)\right] \leq E\left[f(x)\right]\]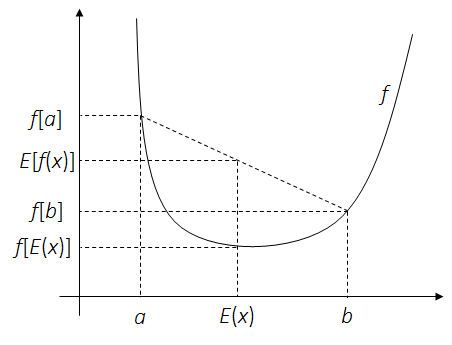
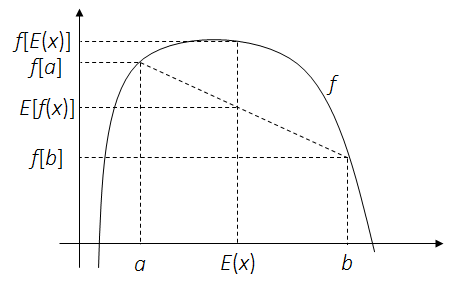
定理. 对一个凹函数$f$和随机变量$x$:
1.3 矩阵求导
多维高斯混合模型的求解需要借助于矩阵和向量求导的公式。 下面是从 《The Matrix Cookbook》一书中摘录在推导过程中可能会用到的公式。
\[\begin{aligned} \frac{\partial x^Ta}{\partial x} &= \frac{\partial a^Tx}{\partial x} = a\\ \frac{\partial x^TBx}{\partial x} &= (B + B^T )x\\ \frac{\partial (x -s)^TW(x-s)}{\partial x} &= -2W(x-s), \text{ (W是对称矩阵)} \\ \frac{\partial a^TXa}{\partial X} &= \frac{\partial a^TX^Ta}{\partial X} = aa^T\\ \frac{\partial \det(X)}{\partial X} &= \det(X)(X^{-1})^T\\ \frac{\partial \ln \det(X)}{\partial X} &= (X^{-1})^T\\ \frac{\partial \det(X^{-1})}{\partial X} &= -\det(X^{-1})(X^{-1})^T\\ \frac{\partial \ln \det(X)}{\partial X^{-1}} &= \frac{\partial \ln \det(X)}{\partial \det(X)}\frac{\partial \det(X)}{\partial X^{-1}} \\ &= \frac{1}{\det(X)}\left[-\det(X)X^T\right]\\ &= -X^T\\ \frac{\partial Tr(AXB)}{\partial X} &= A^TB^T\\ \frac{\partial Tr(AX^-1B)}{\partial X} &= -(X^{-1}BAX^{-1})^T \end{aligned}\]2.高斯混合模型和EM算法
2.1 高斯混合模型(GMM)
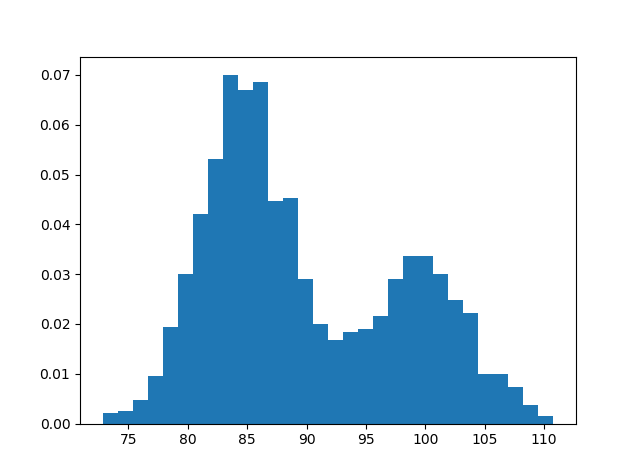
现实采集的数据是比较复杂的,通常无法只用一个高斯分布拟合,而是可以看作多个随机过程的混合。可定义高斯混合模型是$K$个高斯分布的组合,用以拟合复杂数据。
假设有一个数据集,包含了$N$个相互独立的数据:$x = {x_1, x_2 …x_i… x_N}$, 这些数据看起来有$K$个峰,这样的数据集可用以下定义的高斯混合模型拟合:
\[p(x|\Theta) = \sum_{k}^{}\alpha_{k}\textit{N}(x; \mu_k, \sigma_k) = \sum_{k}^{}\alpha_{k}\frac{1}{\sqrt{2\pi\sigma_k^2}}\exp\left[-\frac{(x-\mu_k)^2}{2\sigma_k^2}\right]\]
|
|
|
|
|
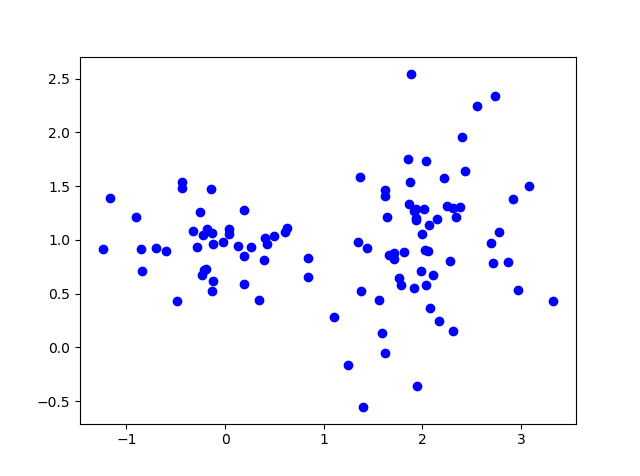
如果每一个数据点$x_i$都是d维的, 这些数据$x$如上图看起来分散在$K$个聚类,这种数据集可以用多变量高斯混合模型拟合。
其中$\Theta$ 代表全体高斯模型参数, $\alpha_k$ 是第$k$个高斯模型的先验概率, 各个高斯模型的先验概率加起来等于1。
\[\sum_{k}\alpha_k = 1\]2.2 EM算法
EM 算法是一种迭代的算法,算法解决的问题可如下表述:
- 采集到一组包含$N$个独立数据的数据集$x$。
- 预先知道、或者根据数据特点估计可以用$K$个高斯分布混合进行数据拟合。
- 目标任务是估计出高斯混合模型的参数:$K$组($\alpha_{k}$, $\mu_k$, $\sigma_k$), 或 ($\alpha_{k}$, $\mu_k$, $\Sigma_{k}$).
似然函数:
对于相互独立的一组数据, 最大似然估计(MLE)是最直接的估计方法。$N$个数据点的总概率可以表述成每个数据点的概率之乘积,这被称作似然函数
\[p(x|\Theta) = \prod_{i}p(x_i|\Theta)\]最大似然估计通过求似然函数的极大值,来估计参数$\Theta$。
\[\Theta = \argmax_{\Theta} \prod_{i}p(x_i|\Theta)\]对高斯混合模型使用最大似然估计,求得的似然函数是比较的复杂的,单变量和多变量GMM似然函数结果如下,可以看到多变量GMM似然函数涉及多个矩阵的求逆和乘积等运算。所以要准确估计出$K$组高斯模型的参数,是很难的。
\[p(x|\Theta) = \prod_{i}p(x_i|\Theta) = \prod_{i}\left[\sum_{k}\alpha_{k}\textit{N}(x_i| \mu_k, \sigma_k) \right]\] \[p(x|\Theta) = \prod_{i}p(x_i|\Theta) = \prod_{i}\left[\sum_{k}\alpha_{k}\textit{N}(x_i| \mu_k, \Sigma_k)\right]\]GMM 似然函数首先可以通过求对数进行简化,把乘积变成和。和的形式更方便求导和求极值。
\[L(x|\Theta) = \sum_{i}\ln\left[p(x_{i}|\mu_k, \sigma_k) \right] = \sum_{i}\ln\left[\sum_{k}\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k) \right]\]隐参数:
是否对前面的对数似然函数进行求极大值,就可以求出目标的$K$组高斯模型参数了呢?我看到公式里面有两重求和,其中一重是在对数函数里面,直接求极值并不可行。
EM算法提出了用迭代逼近的方法,来对最优的高斯混合模型进行逼近。为了帮助迭代算法的过程,EM算法提出了隐参数$z$, 每次迭代,先使用上一次的参数计算隐参数$z$的分布,然后使用$z$更新似然函数,对目标参数进行估计。 在GMM估计问题中,EM算法所设定的隐参量$z$ 一般属于${1 ,2 … k … K}$. 用于描述计算出GMM中$K$组高斯模型的参数后,某个数据点$x_i$属于第$z$个高斯模型的概率:
\[p(z|x_{i}, \mu_k, \sigma_k)\]把隐参量$x$引入到第$i$个数据的概率估计中:
\[p(x_{i}|\Theta) = \sum_{k} p(x_{i}|z=k,\mu_k, \sigma_k) p(z=k) \\\]跟高斯混合分布 $p(x|\Theta) = \sum_{k}^{}\alpha_{k}\textit{N}(x; \mu_k, \sigma_k)$ 作对比, 发现$\alpha_k$就是$z$的先验分布$p(z=k)$.
\[p(z=k) = \alpha_k\]而在$z=k$条件下的$x$条件概率就是第$k$个高斯模型.
\[p(x_{i}|z=k,\mu_k, \sigma_k) = \textit{N}(x_i; \mu_k, \sigma_k)\]现在可以把隐参量代入到对数似然函数中。可以加入冗余项:隐参数在数据$x_i$和高斯参数下的后验概率,从而引入Jensen不等式来简化似然函数。
\[\begin{aligned} L(x|\Theta) &= \sum_{i}\ln\left[p(x_{i}, z|\mu_k, \sigma_k) \right] \\ &= \sum_{i}\ln \sum_{k} p(x_{i}|z=k, \mu_k, \sigma_k)p(z=k) \\ &= \sum_{i}\ln \sum_{k} p(z=k|x_{i},\mu_k, \sigma_k) \frac{p(x_{i}|z=k, \mu_k, \sigma_k)p(z=k)}{p(z=k|x_{i},\mu_k, \sigma_k)} \\ \end{aligned}\]似然函数简化:
下面通过Jensen不等式简化对数似然函数。
\[f\left[E(x)\right] \geq E\left[f(x)\right]\]对照Jensen不等式,让$u$指代 $\frac{p(x_{i}|z=k, \mu_k, \sigma_k)p(z=k)}{p(z|x_{i},\mu_k, \sigma_k)}$。
可以得到
\[f(u) = \ln u\] \[E(u) = \sum_{k} p(z|x_{i},\mu_k, \sigma_k) u\]得到
\[L(x|\Theta) \geq \sum_{i}\sum_{k} p(z=k|x_{i},\mu_k, \sigma_k) \ln \frac{p(x_{i}|z=k, \mu_k, \sigma_k)p(z=k)}{p(z=k|x_{i},\mu_k, \sigma_k)}\]于是似然函数简化成对数函数的两重求和。等式右侧给似然函数提供了一个下界。
我们可以根据贝叶斯准则进行推导其中的后验概率
\[\begin{aligned} p(z=k|x_{i},\mu_k, \sigma_k) &= \frac{ p(x_{i}|z=k,\mu_k, \sigma_k)}{ \sum_{k} p(x_{i}|z=k, \mu_k, \sigma_k)} \\ &= \frac{\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}{\sum_{k}\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)} \end{aligned}\]定义
\[\omega_{i,k} = p(z=k|x_{i},\mu_k, \sigma_k) = \frac{\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}{\sum_{k}\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}\]那么
\[\begin{aligned} L(x|\Theta) &= \sum_{i}\ln \sum_{k} \omega_{i,k} \frac{\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}{\omega_{i,k}} \\ &\geq \sum_{i} \sum_{k} \omega_{i,k} \ln\frac{\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}{\omega_{i,k}} \end{aligned}\]不等式的右侧给似然函数提供了一个下界。EM算法提出迭代逼近的方法,不断提高下界,从而逼近似然函数。每次迭代都以下面这个目标函数作为优化目标:
\[Q(\Theta,\Theta^{t}) = \sum_{i}\sum_{k}\omega_{i,k}^t \ln\frac{\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}{\omega_{i,k}^t}\]这个式子表示,在第$t$次迭代后,获得参数$\Theta^t$,然后就可以计算隐参数概率$\omega_{i,k}^t$。 将隐参数代回$Q(\Theta,\Theta^{t})$, 进行最大似然优化,即可求出更优的参数$\Theta^{t+1}$。
迭代求解:
迭代开始时,算法先初始化一组参数值$\Theta$, 然后间隔地更新$\omega$和$\Theta$。
-
经过$t$轮迭代,已获得一组目标参数$\Theta^t$临时的值。
-
基于当前的参数$\Theta^t$,用高斯混合模型计算隐参数概率 $\omega_{i,k}^t$。然后将隐参数概率代入对数似然函数,得到似然函数数学期望表达式。 这一步叫expectation step.
\[\omega_{i,k}^t = \frac{\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}{\sum_{k}\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}\] -
如前文使用Jensen推导得出,得到每次更新了隐参数$\omega_{i,k}^t$后的目标函数是:
-
利用$\omega_{i,k}$当前值, 最大化目标函数,从而得出新一组GMM参数 $\Theta^{t+1}$. 这一步叫作maximization step。
\[\Theta^{t+1} = \argmax_{\Theta} \sum_{i}\sum_{k} \ln \omega_{i,k}^t \frac{\alpha_{k}\textit{N}(x_{i}| \mu_k, \sigma_k)}{\omega_{i,k}^t}\]
3.EM算法解单变量GMM
单变量 GMM使用EM算法时,完整的目标函数为
\[Q(\Theta,\Theta^{t}) = \sum_{i}\sum_{k}\omega_{i,k}^t\ln\frac{\alpha_{k}}{\omega_{i,k}^t\sqrt{2\pi\sigma_k^2}}\exp\left[-\frac{(x_i-\mu_k)^2}{2\sigma_k^2}\right]\]3.1 E-Step:
E-step目标就是计算隐参数的值, 也就是对每一个数据点,分别计算其属于每一种高斯模型的概率。 所以隐参量$\omega$是一个N×K矩阵.
每一次迭代后 $\omega_{i,k}$都可以用最新的高斯参数$(\alpha_k, \mu_k, \sigma_k)$进行更新。
\[\omega_{i,k}^t = \frac{\alpha_{k}^t\textit{N}(x_{i}| \mu_k^t, \sigma_k^t)}{\sum_{k}\alpha_{k}^t\textit{N}(x_{i}| \mu_k^t, \sigma_k^t)}\]E-step 就可以把更新的$\omega$代入似然函数,得到目标函数的最新表达。该目标函数展开如下:
\[Q(\Theta,\Theta^{t}) = \sum_{i}\sum_{k}\omega_{i,k}^t\left(\ln\alpha_k - \ln \omega_{i,k}^t - \ln \sqrt{2\pi\sigma_k^2}-\frac{(x_i-\mu_k)^2}{2\sigma_k^2}\right)\]3.2 M-Step:
M-step的任务就是最大化目标函数,从而求出高斯参数的估计。 \(\Theta := \argmax_{\Theta} Q(\Theta,\Theta^{t})\)
更新$\alpha_k:$
在高斯混合模型定义中,$\alpha_k$受限于$\sum_{k}\alpha_k =1$。所以$\alpha_k$的估计是一个受限优化问题。
\[\begin{gathered} \alpha_k^{t+1} := \argmax_{\alpha_k}{ \sum_{i}\sum_{k}\omega_{i,k}^t\ln\alpha_k}\\ \text{subject to} \sum_{k}\alpha_k =1 \end{gathered}\]这种问题通常用拉格朗日乘子法计算。下面构造拉格朗日乘子:
\[\mathcal{L}(\alpha_k, \lambda) = { \sum_{i}\sum_{k}\omega_{i,k}^t\ln\alpha_k}+ \lambda\left[\sum_{k}\alpha_k -1\right]\]对拉格朗日方程求极值,也就是对$\alpha_k$求导数为0处,该点就是我们要更新的$\alpha_{k}^{t+1}$值。
\[\begin{aligned} \frac{\partial \mathcal{L}(\alpha_k, \lambda) }{\partial \alpha_k} &= { \sum_{i}\omega_{i,k}^t\frac{1}{\alpha_k}}+ \lambda = 0 \\ \Rightarrow \alpha_k &= -\frac{\sum_{i}\omega_{i,k}^t}{\lambda} \end{aligned}\]将所有$k$项累加, 就可以求得$\lambda$.
\[\begin{aligned} \sum_{k}\alpha_k &= -\frac{\sum_{i}\sum_{k}\omega_{i,k}^t}{\lambda} \\ \Rightarrow 1 &= -\sum_{i}\frac{1}{\lambda} = -\frac{N}{\lambda} \\ \Rightarrow \lambda &= -N \end{aligned}\]于是利用地$t$次迭代的隐参量,我们就得到了$\alpha_k$在$t+1$次迭代的更新方程:
\[\alpha_k^{t+1} = \frac{\sum_{i}\omega_{i,k}^t}{N}\]更新$\mu_k:$
$\mu_k$并没有类似$\alpha_k$的限制条件,可以直接把目标函数对$\mu_k$求导数:
\[\mu_k^{t+1} := \argmax_{\mu_k} Q(\Theta,\Theta^{t})\]让$\frac{\partial Q(\Theta,\Theta^{t})}{\partial \mu_k}=0$, 得到 \(\frac{\partial \sum_{i}\sum_{k}\omega_{i,k}^t\left(\ln\alpha_k - \ln \omega_{i,k}^t - \ln \sqrt{2\pi\sigma_k^2}-\frac{(x_i-\mu_k)^2}{2\sigma_k^2}\right)}{\partial \mu_k} = 0\)
\[\begin{aligned} \sum_{i}\omega_{i,k}^t\frac{x_i-\mu_k}{\sigma_k^2} = 0\\ \Rightarrow \sum_{i}\omega_{i,k}^t\mu_k = \sum_{i}\omega_{i,k}^tx_i \\ \Rightarrow \mu_k\sum_{i}\omega_{i,k}^t = \sum_{i}\omega_{i,k}^tx_i \end{aligned}\]所以在$t+1$次迭代, $\mu_k$就用全部$x$的加权平均来求得,权值正是$x_i$属于第$k$个模型产生的概率$\omega_{i,k}^t$。
\[\mu_k^{t+1} = \frac{\sum_{i}\omega_{i,k}^tx_i}{\sum_{i}\omega_{i,k}^t}\]更新$\sigma_k:$
类似地, 将目标函数对$\sigma_k$求极大值:
\[\sigma_k^{t+1} := \argmax_{\sigma_k} Q(\Theta,\Theta^{t})\]让导数为0:
\[\frac{\partial Q(\Theta,\Theta^{t})}{\partial \sigma_k} = \frac{\partial \sum_{i}\sum_{k}\omega_{i,k}^t\left(\ln\alpha_k - \ln \omega_{i,k}^t - \ln \sqrt{2\pi\sigma_k^2}-\frac{(x_i-\mu_k)^2}{2\sigma_k^2}\right)}{\partial \sigma_k}=0\]得到
\[\begin{aligned} \sum_{i}\omega_{i,k}\left[-\frac{1}{\sigma_k}+\frac{(x_i-\mu_k)^2}{\sigma_k^3}\right]&= 0\\ \Rightarrow \sum_{i}\omega_{i,k}\sigma_k^2 &= \sum_{i}\omega_{i,k}(x_i-\mu_k)^2 \\ \Rightarrow \sigma_k^2 \sum_{i}\omega_{i,k} &= \sum_{i}\omega_{i,k}(x_i-\mu_k)^2 \\ \end{aligned}\]高斯模型里面使用的都是$\sigma_k^2$,所以就不需要求平方根了。$\sigma_k^2$的更新方程如下,依赖于更新的$\mu_k$。 所以一般都是先把$\mu_k^{t+1}$算出来,然后再更新$\sigma_k^2$。
\[(\sigma_k^2)^{t+1} = \frac{\sum_{i}\omega_{i,k}(x_i-\mu_k^{t+1})^2 }{\sum_{i}\omega_{i,k}}\]4.EM算法解多变量GMM
同样的,我们可以得到每次迭代的目标函数如下:
\[Q(\Theta,\Theta^{t}) = \sum_{i}\sum_{k}\omega_{i,k}^t\ln\frac{\alpha_{k}}{\omega_{i,k}^t\sqrt{(2\pi)^d\det(\Sigma_k)}}\exp\left[-\frac{1}{2}(x_i-\mu_k)^T\Sigma_k^{-1}(x_i-\mu_k)\right]\]其中
- $x_i$是d×1的向量,
- $\alpha_k$ 一个0和1间的值,
- $\mu_k$是d×1的向量,
- $\Sigma_k$是d×d的矩阵,
- $\omega$是N×K的矩阵。
4.1 E-Step:
跟单变量GMM一样,E-step计算隐参数,但是需要用多维高斯分布,利用了多维矩阵乘法和矩阵求逆,计算复杂度要大很多。
\[\omega_{i,k}^t = \frac{\alpha_{k}^t\textit{N}(x_{i}| \mu_k^t, \Sigma_k^t)}{\sum_{k}\alpha_{k}^t\textit{N}(x_{i}| \mu_k^t, \Sigma_k^t)}\]目标函数更新如下:
\[\begin{aligned} &Q(\Theta,\Theta^{t}) \\ &= \sum_{i}\sum_{k}\omega_{i,k}^t\left(\ln\alpha_k - \ln \omega_{i,k}^t - \frac{d}{2}\ln \sqrt{(2\pi)^d} -\frac{1}{2}\ln\det(\Sigma_k)-\frac{1}{2}(x_i-\mu_k)^T\Sigma_k^{-1}(x_i-\mu_k)\right) \end{aligned}\]4.2 M-Step:
更新$\alpha_{k}:$
多变量GMM下,$\alpha_k$的更新跟单变量 GMM一样。
\[\begin{gathered} \alpha_k^{t+1} := \argmax_{\alpha_k}{ \sum_{i}\sum_{k}\omega_{i,k}^t\ln\alpha_k}\\ \text{subject to} \sum_{k}\alpha_k =1 \end{gathered}\]得到完全一样的更新方程:
\[\alpha_k^{t+1} = \frac{\sum_{i}\omega_{i,k}^t}{N}\]更新$\mu_k:$
\[\mu_k^{t+1} := \argmax_{\mu_k} Q(\Theta,\Theta^{t})\]$Q(\Theta,\Theta^{t})$对$\mu_k$求导,得到
\[\frac{\partial Q(\Theta,\Theta^{t})}{\partial \mu_k} = \sum_{i}\omega_{i,k}^t\frac{\partial \left[-\frac{1}{2}(x_i-\mu_k)^T\Sigma_k^{-1}(x_i-\mu_k)\right]}{\partial \mu_k} = 0\\\]实数协方差矩阵$\Sigma_{k}$对称的, 其逆矩阵也是对称的。 于是我们可以利用第一部分列出的公式$\frac{\partial (x -s)^TW(x-s)}{\partial x} = -2W(x-s)$求偏导数.
\[\frac{\partial Q(\Theta,\Theta^{t})}{\partial \mu_k} = \sum_{i}\omega_{i,k}^t \Sigma_{k}^{-1}\left(x_i - \mu_k\right) =0\] \[\Rightarrow \sum_{i}\omega_{i,k}^t x_i= \mu_k\sum_{i}\omega_{i,k}^t\]所以$\mu_k$的更新方程同样是$x$的加权平均,只是这时候$\mu_k$ is a d×1 向量。 \(\mu_k^{t+1} = \frac{\sum_{i}\omega_{i,k}^t x_i}{\sum_{i}\omega_{i,k}^t}\)
更新$\Sigma_k:$
\[\Sigma_k^{t+1} := \argmax_{\Sigma_k} Q(\Theta,\Theta^{t})\]让导数$\frac{\partial Q(\Theta,\Theta^{t})}{\partial \Sigma_k^{-1}} =0$, 得到
\[\begin{aligned} \frac{\partial Q(\Theta,\Theta^{t})}{\partial \Sigma_k^{-1}} &= \sum_{i}\omega_{i,k}^t\frac{\partial \left[ -\frac{1}{2}\ln\det(\Sigma_k)-\frac{1}{2}(x_i-\mu_k)^T\Sigma_k^{-1}(x_i-\mu_k)\right]}{\partial \Sigma_k^{-1}} \\ &= -\frac{1}{2} \sum_{i}\omega_{i,k}^t \left[\frac{\partial \ln\det(\Sigma_k)}{\partial \Sigma_k^{-1}}+\frac{\partial (x_i-\mu_k)^T\Sigma_k^{-1}(x_i-\mu_k)}{\partial \Sigma_k^{-1}} \right] \\ &= 0 \end{aligned}\]协方差矩阵$\Sigma_k$是对称的,可以利用第一部分的矩阵求导公式 $\frac{\partial \ln \det(X)}{\partial X^{-1}} =-X^T $ and $\frac{\partial a^TXa}{\partial X} = aa^T$,求得极大值$ Q(\Theta,\Theta^{t})$.
\[\frac{\partial Q(\Theta,\Theta^{t})}{\partial \Sigma_k^{-1}} = \frac{1}{2}\sum_{i}\omega_{i,k}^t \left[\Sigma_k - (x_i-\mu_k)(x_i-\mu_k)^T\right] = 0\]类似地, 我们可以得到$\Sigma_k$在第$t+1$次迭代的更新方程, 它依赖于$\mu_k$。所以我们需要先计算$\mu_k^{t+1}$,然后更新$\Sigma_k$
\[\Sigma_k^{t+1} = \frac{\sum_{i}\omega_{i,k}^t (x_i-\mu_k^{t+1})(x_i-\mu_k^{t+1})^T }{\sum_{i}\omega_{i,k}^t}\]5.总结
| 单变量GMM | 多变量GMM | |
|---|---|---|
| 初始化 | $$\alpha_{k}^0, \mu_k^0, \sigma_k^0$$ | $$\alpha_{k}^0, \mu_k^0, \Sigma_k^0$$ |
| E-Step | $$ \omega_{i,k}^t = \frac{\alpha_{k}^t\textit{N}(x_{i}| \mu_k^t, \sigma_k^t)}{\sum_{k}\alpha_{k}^t\textit{N}(x_{i}| \mu_k^t, \sigma_k^t)} $$ | $$ \omega_{i,k}^t = \frac{\alpha_{k}^t\textit{N}(x_{i}| \mu_k^t, \Sigma_k^t)}{\sum_{k}\alpha_{k}^t\textit{N}(x_{i}| \mu_k^t, \Sigma_k^t)} $$ |
| M-Step | $$ \begin{aligned} \alpha_k^{t+1} &= \frac{\sum_{i}\omega_{i,k}^t}{N}\\ \mu_k^{t+1} &= \frac{\sum_{i}\omega_{i,k}^t x_i}{\sum_{i}\omega_{i,k}^t}\\ (\sigma_k^2)^{t+1} &= \frac{\sum_{i}\omega_{i,k}^t(x_i-\mu_k^{t+1})^2 }{\sum_{i}\omega_{i,k}^t} \end{aligned} $$ | $$\begin{aligned} \alpha_k^{t+1} &= \frac{\sum_{i}\omega_{i,k}^t}{N}\\ \mu_k^{t+1} &= \frac{\sum_{i}\omega_{i,k}^tx_i}{\sum_{i}\omega_{i,k}^t}\\ \Sigma_k^{t+1} &= \frac{\sum_{i}\omega_{i,k}^t (x_i-\mu_k^{t+1})(x_i-\mu_k^{t+1})^T }{\sum_{i}\omega_{i,k}^t} \end{aligned}$$ |